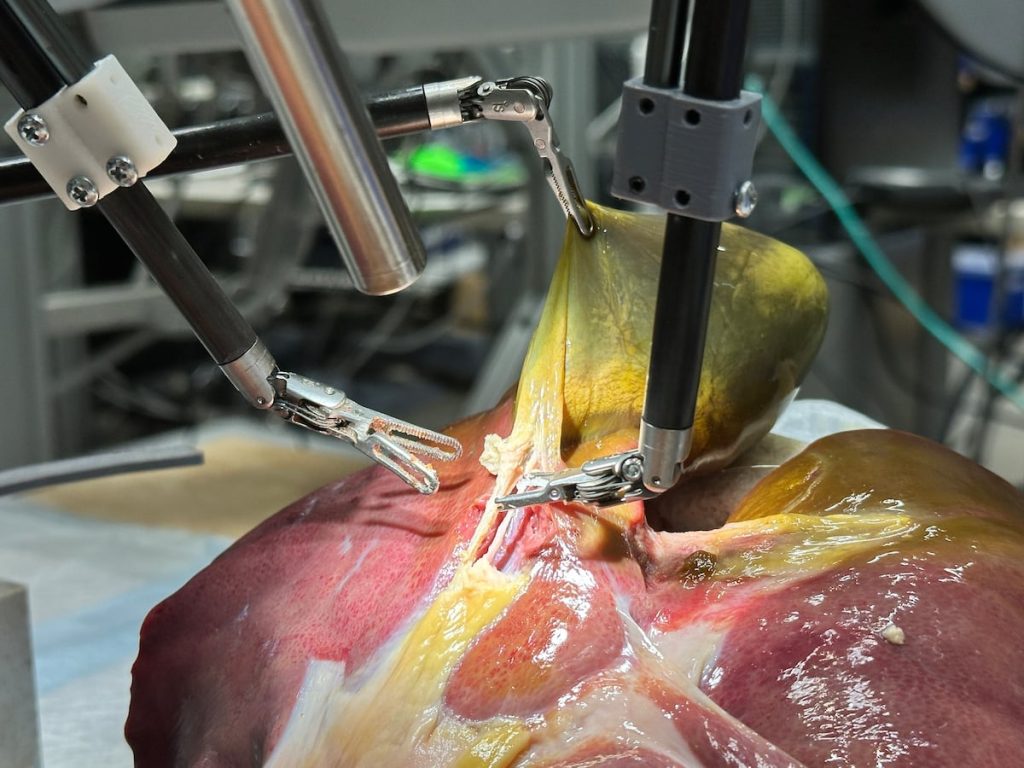
Hace casi cuatro décadas, la Agencia de Proyectos de Investigación Avanzados de Defensa (DARPA) y la NASA comenzaron a impulsar proyectos que hiciesen posible realizar cirugías a distancia, en el campo de batalla o en el espacio. De aquellos esfuerzos iniciales surgieron sistemas robóticos quirúrgicos como Da Vinci, que funcionan como una extensión del cirujano y le permiten realizar intervenciones poco invasivas con controles remotos y visión en tres dimensiones. Pero eso sigue siendo un humano utilizando una sofisticada herramienta. Ahora, la incorporación de la inteligencia artificial generativa y el aprendizaje automático al control de sistemas como Da Vinci comienzan a hacer imaginable la aparición de robots cirujanos autónomos.Este miércoles la revista Science Robotics publica los resultados de un estudio realizado por investigadores de las universidades Johns Hopkins y Stanford en el que presentan un sistema capaz de realizar de forma autónoma varios de los pasos de una cirugía, aprendiendo de vídeos de humanos operando y recibiendo órdenes con lenguaje natural, como lo haría un médico en prácticas. Más informaciónComo en el aprendizaje de un humano, el grupo de científicos ha ido incorporando a su formación pasos necesarios para completar una cirugía. El año pasado, el equipo de la Johns Hopkins, liderado por Axel Krieger, entrenó al robot para hacer tres tareas quirúrgicas básicas: manejar una aguja, elevar tejido corporal y suturar. Este entrenamiento se realizó a través de la imitación y de un sistema de aprendizaje automático parecido al que utiliza ChatGPT, pero sustituyendo las palabras y el texto por un lenguaje robótico que traduce a matemáticas los ángulos del movimiento de la máquina.En el nuevo experimento, dos cirujanos humanos experimentados realizaron demostraciones de cirugías de extirpación de la vesícula biliar en tejidos de cerdo fuera del animal. Se utilizaron 34 vesículas para recoger 17 horas de datos y 16.000 trayectorias que sirvieron a la máquina para aprender. Después, los robots, sin intervención humana y con ocho vesículas que no habían visto previamente, fueron capaces de realizar con una precisión del 100% algunas de las 17 tareas necesarias para extirpar ese órgano, como identificar ciertos conductos y arterias, sujetarlos con precisión, colocar clips de forma estratégica y cortar con tijeras. Durante los experimentos, el modelo fue capaz de corregir sus propios errores y de adaptarse a situaciones imprevistas.En 2022, este mismo equipo realizó la primera cirugía robótica autónoma en un animal vivo: una laparoscopia en un cerdo. Pero ese robot necesitó que el tejido tuviese marcas especiales, dentro de un entorno controlado y siguiendo un plan quirúrgico establecido. En una nota de su institución, Krieger dijo que fue como enseñar a un robot a conducir por una ruta cuidadosamente trazada. El nuevo experimento que acaba de presentar sería —para el robot— como conducir por una carretera que no conocía a partir de, solamente, un aprendizaje general de cómo se maneja un coche.José Granell, jefe del departamento de Otorrinolaringología y Cirugía de Cabeza y Cuello del Hospital Universitario HLA Moncloa, y profesor de la Universidad Europea de Madrid, considera que el trabajo del equipo de la Johns Hopkins “empieza a entrar en algo que se acerca a una cirugía real”. “El problema de la cirugía robótica de tejido blando es que la biología tiene mucha variabilidad intrínseca, y, aunque conozcas la técnica, en el mundo real hay muchos escenarios posibles”, explica Granell. “Pedirle a un robot que labre un hueso es fácil, pero en un tejido blando, todo es más difícil, porque se mueve, es impredecible saber cómo va a reaccionar cuando empujes, cuánto se va a desplazar, si cuando coja una arteria se va a romper si tiro demasiado”, continúa este cirujano, y remacha: “Esta tecnología cambia la forma de entrenar la sucesión de gestos que es la cirugía”.Para Krieger, este avance nos lleva “desde robots que pueden ejecutar tareas quirúrgicas específicas a robots que realmente comprenden los procedimientos quirúrgicos”. El líder del equipo que ha realizado esta innovación gracias a la ayuda de la IA generativa asevera: “Es una distinción crucial que nos acerca significativamente a sistemas quirúrgicos autónomos viables en la práctica clínica, capaces de desenvolverse en la realidad desordenada e impredecible de la atención real a los pacientes”.Francisco Clascá, catedrático de Anatomía y Embriología Humana de la Universidad Autónoma de Madrid, valora el avance, pero recuerda que “es una cirugía muy simple” y se realiza con órganos de “animales muy jóvenes, que no tienen el grado de deterioro y complicación de una persona con 60 o 70 años, que es cuando se suelen necesitar este tipo de cirugías”. Además, el robot sigue siendo mucho más lento que un humano realizando las mismas tareas.Una meta que “está muy lejana”Mario Fernández, jefe de sección de Cirugía de Cabeza y Cuello del Hospital General Universitario Gregorio Marañón, en Madrid, considera interesante el avance, pero cree que la sustitución de cirujanos humanos por máquinas “está muy lejana”. Y advierte ante la fascinación por la tecnología sin tener en cuenta lo que aporta realmente; y además su precio, que hace que no llegue a todo el mundo. “Conozco un hospital de la India, por ejemplo, en el que tienen un robot y pueden hacer dos sesiones al mes de cirugía en la que operan a dos pacientes. En total, 48 al año. Para ellos, la cirugía robótica puede dar para jugar y aprender, pero no es una realidad para los pacientes de allí”, señala Fernández, quien considera que “debemos apreciar” los progresos tecnológicos, pero que la cirugía se debe valorar por lo que aporta a los pacientes. Como ejemplo contrario pone “una técnica que se llama cirugía transoral con bisturí de ultrasonidos, que se desarrolló en Madrid y está en todo el mundo, se hacen seis pacientes diarios”.Krieger considera que su prueba de concepto muestra que es posible realizar procedimientos quirúrgicos complejos de manera autónoma y que su sistema de aprendizaje por imitación se podrá llevar a más tipos de cirugías, algo que seguirán poniendo a prueba con otras intervenciones.Para el futuro, Granell señala que, además de seguir superando retos técnicos, el proceso para la adopción de robots será lento porque en cirugía “somos muy conservadores con la seguridad del paciente”. Además, plantea cuestiones filosóficas como la superación de la primera y la segunda ley de la robótica planteada por Isaac Asimov: “Un robot no hará daño a un ser humano ni, por inacción, permitirá que un ser humano sufra daño” y “un robot debe obedecer las órdenes que le sean dadas por un ser humano, salvo cuando dichas órdenes entren en conflicto con la Primera Ley”. Este especialista señala la aparente contradicción que supone el hecho de que los cirujanos humanos “sí que hacemos un daño, buscando el beneficio del paciente; y esta es una dicotomía que [para un robot] habrá que resolver”.
Un robot muestra que algún día las máquinas pueden sustituir a los cirujanos humanos | Salud y bienestar
Shares: